工作任务 #1988
工作任务 #1986: 工业视觉系统运维项目:思维科仿真软件测评
思维科仿真软件测评任务
描述
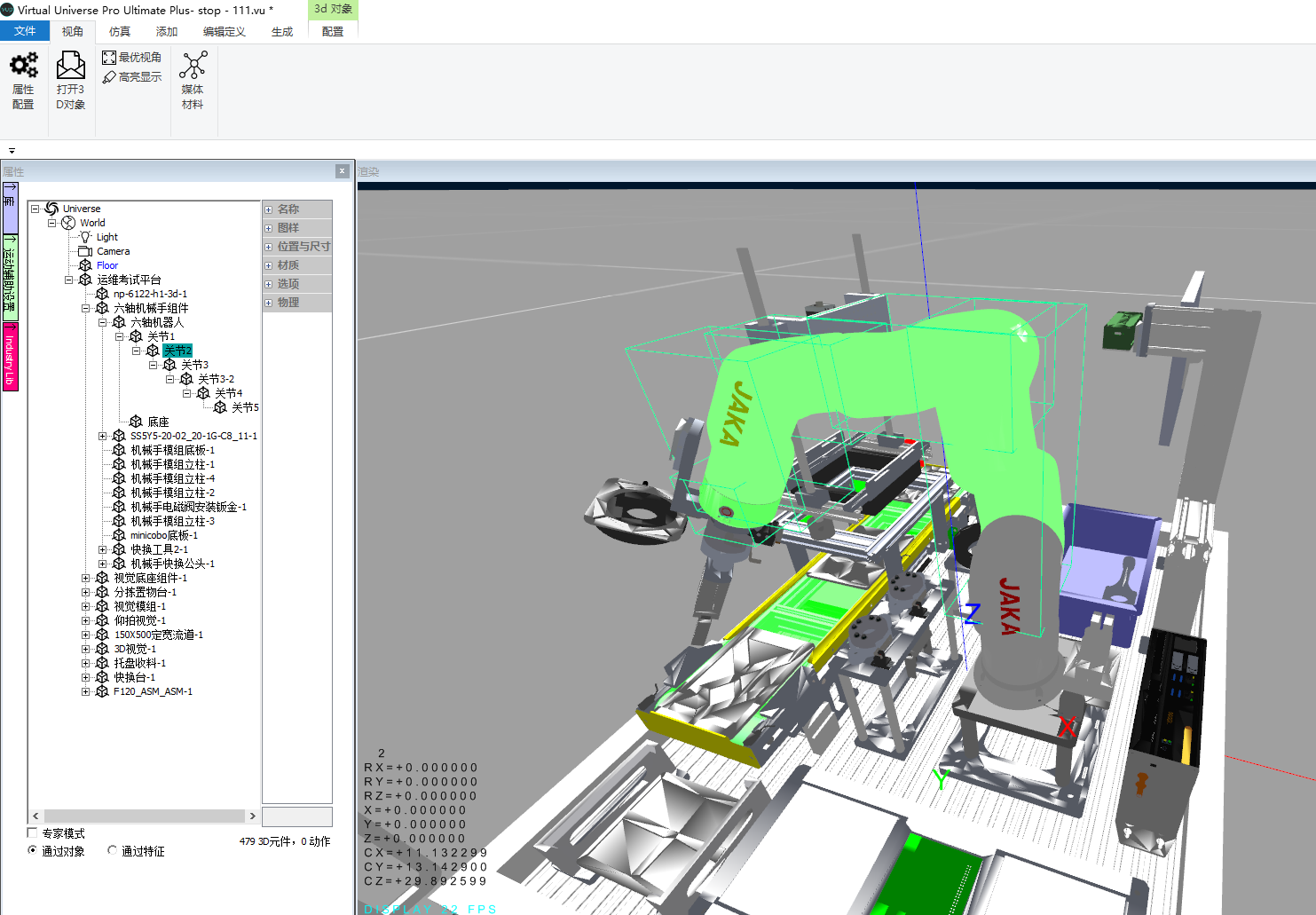
1.了解并使用思维科仿真软件进行模型导入(赛事设备),实现动作仿真
2.实现仿真软件与KImage进行交互
3.完成案例:项目7:2D物料分拣
4.完成案例:项目10:二维码工件识别
学习导入运维考试平台模型,进行模型机器人子父及设置
6.24:1. 学习VUP仿真软件,加上相机拍照虚拟显示在显示屏。向VUP的技术支持询问,同时进行远程支持带有摄像头功能会存在不能进行最小化和缩小不然就是闪退的问题依旧存在只能自己注意点。
2. 继续机器人运动设置,部分感觉旋转很奇葩角度转大一点关节就会错位,在群哪里问他们有没有这样的案例没有回复,先这样动着.明天进行设置通讯看看触发能不能控制机器人运动
6.25:1. 学习VUP仿真软件来控制机器人旋转点位,在群里询问技术支持,给了一个与机器人驱动交互的视频不对,后面再次询问没有下文,自己摸索不行,下午再次询问说没有这样的案例,后面询问我要实现上位程序用plc发数据控制仿真软件里面的机器人走一个点位要怎么实现,他们回答说软件能和虚拟plc交互的,应该可以, 要直接走tcp ip的话,需要他们进行内部测试的。后面6点才发了一个视频过来,明天看看怎么实现这个控制交互给plc信号控制机器人走一个点位
2. 振渝用秉优软件来实现这个机台的实验,我就继承合并他前面做的传送带等步骤的东西到VUP软件里
6.27:1. 学习vup软件,跟着视频进行单个关节添加plc控制编程及信号
2. 查看了三菱plc连接uvp软件,是用他们的demo自己写的进行编程与三菱软件连接不符合,查看下一个西门子的连接方法,也是一样与西门子的软件进行连接。检查他们plc就东西也是只能去连接他人的软件,我们kimage也是只能连接,两个软件不能直接进行plc通讯
3. 如果要需用tcp\IP进行通讯他们要发软件给他们进行内部测试才能确定
4. 进行vup问题记录已经发出来
暂停

{kind=link}
历史记录
#4 由 杨东升 更新于 12 个月 之前
- 文件 VUP相关问题.xlsx VUP相关问题.xlsx 已添加
- 描述 已更新。 (diff)